
Was bei Diskussionen um das autonome Fahren völlig missverstanden wird ist, wie gewaltig der Rückstand der Automobilhersteller bei der Entwicklung von autonomen Autos auf Waymo mittlerweile ist.
Long Tail, Long Nose, Short Nose
Aber zuerst mal langsam. Sehen wir uns zuerst einige Begrifflichkeiten an. Chris Anderson machte 2004 den Begriff Long Tail mit seinem gleichnamigen Buch populär. In einem Online-Shop wie Amazon werden von wenigen Büchern Unmengen umgesetzt, und von den Millionen anderen nur einige wenige. Einzeln wenig, aber zusammen genommen ergeben sie eine erkleckliche Summe.
Bill Buxton von Microsoft führte in Anlehnung an den Long Tail die Long Nose ein, ein Begriff der beschreibt, wie neue Technologie im Allgemeinen lange unter dem Radar bleibt, und dann für die breite Öffentlichkeit plötzlich auftaucht und ihren Siegeszug antritt. Damit lassen sich beim Foresight besser Trends erkennen.

Ich möchte eine Spezialform von exponentiellen Kurven besprechen, die ich die sogenannte Short Nose (kurze Nase) nenne. Wir kennen die exponentielle Funktion, wie sie bei Mikroprozessoren vorkommt. Alle 18 bis 24 Monate verdoppelt sich die Anzahl der Transistoren. Am Anfang geht das in uns langsam vorkommenden Schritten, doch dann steigt die Kurve sehr rasant.
Der Short Nose-Kurvenverlauf ist auch exponentiell, geht allerdings zuerst rasch voranschreitend vor und wird dann langsamer.
Die Short Nose bei autonomen Autos
Sehen wir uns das am Beispiel der Entwicklung von autonomen Autos an. Wenn die Entwickler beginnen, Fahrsituationen und Verkehrssituationen zu definieren, die autonome Autos beherrschen müssen, dann ist bestimmt die Fahrt auf der Autobahn oder einer Straße zwischen Spurmarkierungen darin enthalten. Abstandhalten hinter einem Auto, Spurwechsel, Abfahrt auf der Autobahn, Rechtsabbiegen an der Kreuzung, Stopp vor einem Fußgängerübergang. Jedes der Szenarien kann in multiplen Varianten vorkommen. Man füge dazu nur einfach Gegenverkehr oder Fußgänger hinzu. Dann Straßenschilder, Signale, Baustellenhütchen, Radfahrer, Polizeiautos, Schulbusse, Lastwagen, Objekte, die auf eine Straße fallen, und alles wird viel komplexer.
Aus wenigen Dutzend Fahrsituationen und Verkehrsszenarien wurden einige tausend oder sogar hunderttausend. Man füge noch unterschiedliche Lichtbedingungen je nach Tageszeit hinzu, Wetterbedingungen wie blendende Sonne, Schneegestöber, leichtem Nieseln, Windböen, oder spezielle Ereignisse wie Freudenfeiern nach einem WM-Sieg, Karnevalsumzüge, Kinder zu Halloween, randalierende Personen und die Zahl an möglichen Verkehrsszenarien explodiert förmlich. Milliarden von sogenannten Randszenarien, nur sehr selten auftretenden Situationen sind möglich.
Nicht alle Kombinationen werden auftreten (Kinder zu Halloween wird man bei Hagelschlag eher nicht vorfinden) oder sind gleich wahrscheinlich. Manche Szenarien sind nicht vorausdenkbar, wie beispielsweise die Rentnerin im Elektrorollstuhl, die mitten auf der Straße Kreise fährt um eine Ente zu verscheuchen (siehe Video), oder der halbnackte Mann, der freudig erregt auf die Straße hüpft und auf dem Motorraumdeckel des Autos auf und ab springt. Andere sind vorausdenkbar, aber wenig wahrscheinlich.
Die Wahrscheinlichkeit viele dieser Momente überhaupt einzutreten ist gering. Trotzdem wollen wir autonome Autos für solche Situationen vorbereiten, damit sie entsprechend sicher reagieren können, wenn solch ein Fall doch eintreten sollte. Um das zu erreichen, müssen sie in solchen Situationen getestet werden.
Hersteller, die solche unwahrscheinlichen Situationen erleben wollen, tun gut daran, viele autonome Autos viel in echtem Verkehr mitfahren zu lassen. Damit steigt die Wahrscheinlichkeit, solche unwahrscheinlichen Szenarien zu begegnen.
Im konkreten Fall bedeutet das, dass mit einer Handvoll fleißig herumfahrender Autos sehr rasch eine – hier von mir für das Beispiel zur Anschauung beliebig gewählte – Sicherheitsstufe von 50 Prozent erreicht werden kann – vorausgesetzt, dass diese Situationen dann auch gut in der Software verarbeitet wird. Wie wir im folgenden Diagramm sehen, reichen dazu um die 1.700 Situationen, die die Handvoll Autos erleben müssen. Um allerdings auf eine Sicherheitsstufe von 60 Prozent zu gelangen, brauchen wir an die 7.700 Situationen.
Mit jedem Sprung um zehn Prozentpunkte Sicherheit steigt die Zahl der zu testenden Szenarien exponentiell. Von 50 auf 60 Prozent sind das nicht um 10 Prozentpunkte mehr Szenarien, sondern um 450 Prozent mehr. Nicht 20 Prozent, sondern um die 450 Prozent sicherer ist ein Auto auf Sicherheitsstufe 60% als ein Auto auf 50%.
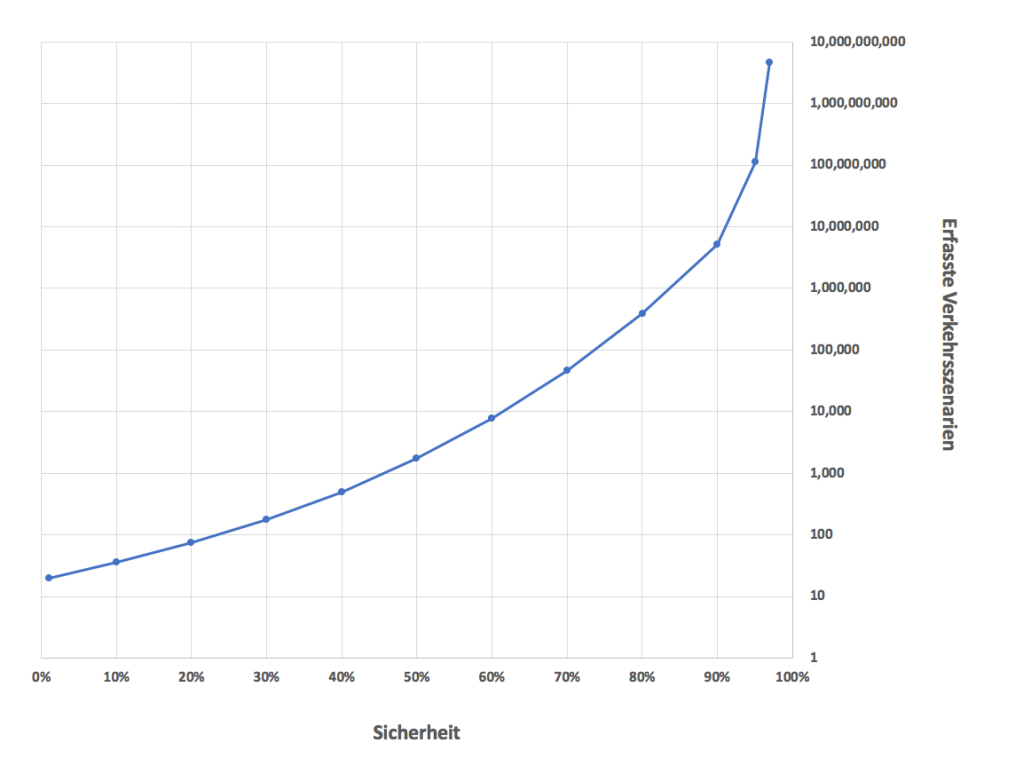
Der Aufwand dafür aber steigt gewaltig, und man arbeitet sich immer langsamer und langsamer an eine höhere Sicherheitsstufe heran. In unserem Beispiel brauchen wir über fünf Millionen berücksichtigte Szenarien, um 90 Prozent zu erreichen.
Ein Unternehmen, dass nicht nur eine Handvoll an Fahrzeugen, sondern mit mehrere hundert Autos gleichzeitig fleißig testet, verbessert die Sicherheit rascher. Eines mit tausenden Autos auf den Straßen klarerweise noch viel rascher. Da manche der Szenarien sehr selten auftreten, beispielsweise jedes Jahr im Testgebiet nur einmal, oder nur alle fünf Jahre, kann es einige Zeit dauern, bis auch diese erfasst wurden. Je länger getestet wird, je mehr Fahrzeuge daran beteiligt sind, und je weiter sich das Testgebiet erstreckt, desto rascher verbessert sich die Sicherheit der beteiligten Fahrzeuge.
Ein Vorsprung von 10 Prozentpunkten von 50 auf 60 Prozent kann bedeuten, dass dafür 2 Jahre Tests notwendig waren. Dieselben 10 Prozentpunkte Vorsprung zwischen 80 und 90 Prozent können aber eine Differenz von zehn Jahren Entwicklungszeit bedeuten. Selbst eine Entwicklungsdifferenz von zwei Jahren kann eine Regulierungsbehörde dazu veranlassen, den weniger sicheren Fahrzeugen die Weiterentwicklung zu verbieten, um die Sicherheit der Öffentlichkeit nicht unnötig zu gefährden und stattdessen den Mitbewerber mit der sichereren Technologie den Vorzug zu geben.
Short Nose versus Lineare Entwicklung
Wie unterscheidet sich die Short Nose von einer linearen Entwicklung wie beim Diesel? Nehmen wir an, ein Verbrennungsmotor kann jedes Jahr um zwei Prozent verbessert werden. Das kann die Emissionen betreffen, den Wirkungsgrad, die Geschwindigkeit, den Verschleiß, womöglich eine Kombination von all dessen. Auch das würde, wenn auch viel langsamer, letztendlich dazu führen, dass der Verbrennungsmotor irgendwann fast keinen Treibstoff mehr verbraucht, superleise ist, nicht verschleißt, und höchstmögliche Effizienz hat – und eben die physikalisch möglichen Grenzen erreicht.
Jeder Prozentpunkt Fortschritt könnte bei inkrementeller Innovation mit erhöhten Kosten erkauft werden. Je mehr er schon optimiert ist, desto rascher steigen die Kosten für jedes weitere Prozentpünktchen an. Während der Fortschritt linear verläuft, steigen die Kosten exponentiell. Die Weiterentwicklung des Verbrennungsmotor wird rasch unwirtschaftlich. Es sei denn, es kommt zu einem technologischen Quantensprung, den es aber beim Verbrennungsmotor selbst in den letzten 100 Jahren nicht wirklich gab.
Der beste Motor, sobald er im Auto verbaut und an die Kunden ausgeliefert ist, wird nicht mehr besser. Ein Verbesserungsschritt, der nach der Auslieferung gefunden wird, kommt in die nächste Generation an Autos, nicht aber an die ausgelieferte. Die Verbesserung stoppt hier.
Ein autonomes Fahrsystem hingegen wird langsam immer besser. Je mehr Autos damit ausgestattet sind, Situationen erfahren und diese in die Software für alle aufgenommen werden, desto rascher werden alle Autos in dieser Flotte besser. Dabei tritt ein selbstverstärkender Effekt ein, wie er von Netzwerken bekannt sind.
Ein Telefon ist ziemlich wertlos. Zwei Telefone können sich anrufen und haben nun einen Wert. Ein drittes Telefon erlaubt mir gleich zwei Teilnehmer anrufen zu können, der Wert hat sich verdoppelt. Jedes weitere Telefon, das zum Netzwerk hinzukommt erhöht den Wert aller Telefone.
Jedes weitere autonome Auto, das in eine Flotte hinzukommt, steigert den Wert der Flotte, weil die Wahrscheinlichkeit steigt, dass die gesamte Flotte mehr Situationen erfahren kann, und damit die Sicherheit aller Autos in der Flotte erhöht. Je sicherer sie sind, desto häufiger werden sie von Passagieren benutzt, desto mehr fahren sie, desto mehr Situationen erleben sie, desto sicherer werden sie. Ein selbstverstärkender Effekt.
Das Short-Nose-Beispiel an autonomen Autos betrachtet der Einfachheit halber nur den Fortschritt anhand der diskutierten Kriterien, und nimmt an, dass einzig und alleine die Anzahl der gefahrenen Kilometer und eingesetzten Autos die Sicherheit verbessern. Tatsächlich gibt es immer wieder Momente, wo man mit den bekannten Algorithmen und eingesetzten Technologien trotz Aufwand nicht mehr weiterkommt. Diese lassen sich manchmal nur durch einen neuen Algorithmus, der erst gefunden werden muss, durch einen neuen Sensor, der erst zu entwickeln ist, oder durch einen schnelleren Mikroprozessor lösen.
Waymo und Mitbewerber
Waymo begann bereits 2009 mit den ersten Testfahrten von autonomen Autos, noch als Projekt Chauffeur und dann als eines der Project X bei Google. Waymo hat bis dato 9 Millionen Meilen (14,4 Millionen Kilometer) im autonomen Fahrmodus zurückgelegt. Und die Qualität dieser Kilometer, von denen nun täglich 40.000 hinzukommen, sind viel höher. Sie werden nicht so sehr beim relativ einfachen Autobahnfahren gesammelt, sondern im anspruchsvolleren Stadtverkehr.
Bislang hat Waymo damit sicherlich die einfachsten Szenarien tausende Male im realen Verkehrsumfeld erlebt, und viele viele seltenere. Dafür sorgen die mittlerweile 600 Autos die Google momentan in Betrieb hat. Und für die nächsten Monate und Jahre plant Waymo, 82.000 weitere Fahrzeuge auf die Straßen zu bringen. Das sind 136 Mal so viele Autos wie Waymo heute betreibt und die würden bei gleichbleibender Fahrleistung pro Tag 5,5 Millionen Kilometer an Fahrleistung bringen. An drei Tagen würde Waymo mehr autonome Kilometer fahren, als in den gesamten vergangenen 9 Jahren.
Das einzige Unternehmen, von dem wir wissen, dass es die Millionengrenze an gefahrenen Kilometern erreicht hat, ist Uber. Und Uber hat wegen eines tödlichen Unfalls seine Test seit einem halben Jahr eingestellt. GMCruise scheint ein anderer Hersteller zu sein, der eine hohe Zahl an gefahrenen Kilometern erreicht haben muss. Die Flotte besteht aus über 100 Fahrzeugen.
Die große Unbekannte ist tatsächlich Tesla. Hier ist eine einzigartige Situation gegeben, weil Tesla mehr 200.000 Autos mit einem Autopilot Hardware Kit auf den Straßen hat und seit vergangenem Jahr fleißig passiv Daten sammelt. Auch wenn die Datenqualität sicherlich nicht die von Waymo ran reicht, könnte die schiere Menge an heute bereits passiv Daten sammelnden Autos das zumindest teilweise kompensieren. Ich würde deshalb Tesla hier noch nicht ganz abschreiben.
Man vergleiche das nun mit deutschen Herstellern. Es gibt die weit verbreitete Meinung, dass man bei autonomen Autos knappe zwei Jahre oder so hinten nach sei. Wie oben erläutert, stimmt das nicht. Es handelt sich um viel mehr Rückstand, der, wenn die Pläne von Waymo so durchgehalten werden, eigentlich uneinholbar ist.
Dabei habe ich hier nur Fahren im echten Verkehr beschrieben, Hinzu kommt, dass Waymo ein umfangreiches Simulationsprogramm betreibt, das um einen Faktor 1.000 die Kilometeranzahl in die Höhe treibt. Jedes interessante Szenario wird im Simulator in mehreren tausend Varianten durchgespielt. Mittlerweile trägt der Simulator 80 Prozent der Verbesserungen der Technologie bei.
Das sind alles Bausteine und Aufwände, die man selbst mit tiefen Taschen nicht so einfach auf die Beine stellen kann, geschweige einen Rückstand einholen kann. So wie sich das Universum immer schneller ausdehnt, weitet sich der Rückstand der Hersteller auf Waymo aus.
Kein Wunder, dass einerseits die Investmentbank UBS vorhersagt, dass Waymo im Jahr 2030 mehr als 60 Prozent des Markts für autonome Autos beherrschen wird, und andererseits die Bewertung von Waymo durch Morgan Stanley bei 175 Milliarden Dollar ansetzt. Alle anderen bleiben nur mehr Nischen, oder droht das Schicksal von Microsofts Suchmaschine Bing. Oder sie lizenzieren Waymo-Technologie.
Die Hoffnung der deutschen Hersteller auf das Kommen einer Wunderwaffe ist falsch. Waymos Short Nose zeigt ihnen die lange Nase.
Dieser Beitrag ist auch auf Englisch erschienen.

Ich finde den Tesla-Ansatz aus einem weiteren Grund interessant: Tesla kann im Prinzip die ganze Zeit eine Simulation der Selbstfahr-Software mitlaufen lassen und dann im Hintergrund damit abgleichen, wie der Fahrer reagiert. Dadurch kann man nicht nur automatisch Situationen markieren, die man noch nicht beherrscht. Sondern man kann auch die Erwartungskonformität prüfen: fährt die Software so, wie ein menschlicher Fahrer es erwarten würde?
LikeLike
Oder anders ausgedrückt: jeder Tesla-Fahrer liefert der Firma kostenlos die realistischsten Trainingsdaten. Das Problem ist: Tesla wird auch exponentiell mit bekannten, langweiligen Daten überschwemmt und muss einen Weg finden, die „black swans“ in den Daten zu finden. Und dabei kann man nicht nur nach Unfällen suchen, wenn man Kundenakzeptanz jenseits der Fan-Gemeinde haben will.
LikeLike