
Die erste Vorstellung außerhalb von China von Apollo, der Open Source Plattform für die Entwicklung von autonomen Autos vom chinesischen Internetgiganten Baidu, fand gestern in Baidus Silicon Valley-Niederlassung in Sunnyvale statt.
Vor mehreren hundert Interessierten wurde die Motivation Baidus zu Apollo, der Leistungsumfang, die Architektur, Partnerschaften und bisherige Projekte vorgestellt. Offiziell gelauncht wurde die Version Apollo 1.0 am 5. Juli 2017 in Peking auf der Baidu Create AI Konferenz. Auf GitHub, wo der Apollo-Quellcode abgelegt ist, wurden bisher 6.000 Downloads gemacht, sowie 1.300 Forks.
Baidu will Autonomes Fahren demokratisieren, nicht monopolisieren. Laut Baidu Präsident Ya-Qig Zhang glaubt Baidu an den Open Source-Ansatz, der Entwicklern mehr Kontrolle gibt und hilft die Entwicklung dieser Technologie zu beschleunigen.
Klar ist, dass Baidu damit den Entwicklungsrückstand zu Unternehmen wie Google aufzuholen und seine eigenen Cloud-Dienstleitungen anzupreisen versucht. Interessant ist dabei, dass Google mit einer ähnlichen Taktik vor 10 Jahren mit dem mobilen Betriebsssystem Android gegen Apple vorging. Heute findet sich Baidu in dieser Rolle gegen Google.
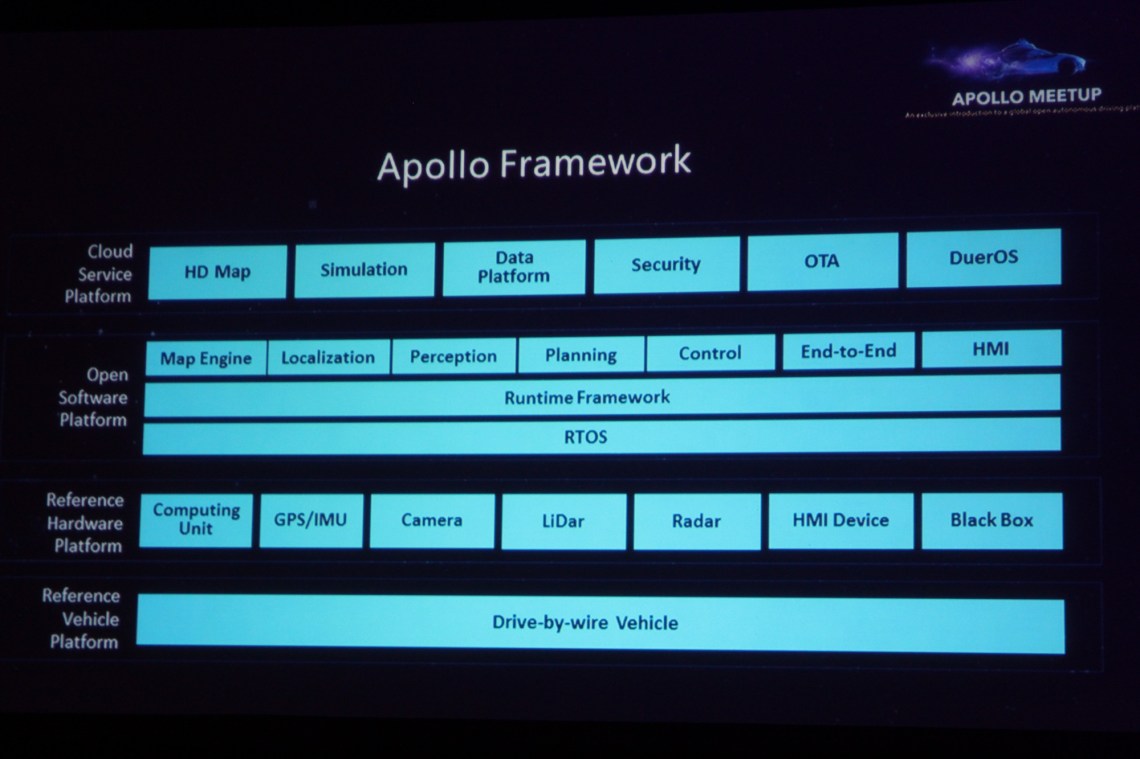
Der Apollo-Framework besteht aus vier Layern, die mit der Fahrzeugplattform beginnen, auf der dann die Hardware wie Lidars, Radars, Mensch-Maschine-Schnittstelle etc. aufgebaut wird, der Open Source Plattform selbst, und dann die Verbindung zur Cloud.
Die Roadmap der Funktionen für die Version 1.5 sieht recht aggressiv aus.
- Juli 2017: autonomes Fahren auf abgesperrten Teststrecken
- Control
- Localization
- Runtime Framework
- Reference Hardware
- Reference Vehicle
- Data Platform 1.0
- Labelled 3D obstacle data
- Road Hackers data
- HD map technology cooperation
- September 2017: Spurhalten
- Obstacle Perception (Velodyne 64 Lidar, CUDA, CuDNN, Caffe, NVIDIA GPU 10Hz)
- Planning (Multi-dimensional inputs, traffic law plug-in, DP/QP path and speed optimizer)
- HD Map
- Simulation Service
- End-to-End Learning (Lateral: curvature; longitudinal: velocity and acceleration; FCNN, Convolutional LSTM)
- Reference Hardware-Lidar
- Artificial road scene data
- Dezember 2017: vereinfachtes autonomes Fahren im Stadtgebiet
- Advanced Perception
- Security Service
- Data Platform 2.0
- Labelled obstacle behavior data
- Labelled 2D obstacle data
- Actual road scenario data derived from driving logs
- Dezember 2018: Geo-umzäunte Autobahnen und Straßen im Stadtgebiet
- Dezember 2019: Alpha-Version für Autobahn und städtische Straßen
- Dezember 2020: Autobahn und stadtweites autonomes Fahren
2019 soll Level 3 autonomes Fahren möglich sein, 2021 dann Level 4. Insgesamt ging Baidu für Apollo bisher 70 Partnerschaften weltweit mit OEMs, Tier 1 und 2 Zulieferern, sowie Start-ups ein, ein Zuwachs von 40 Prozent zum Juli 2017. Jede Woche werden Updates auf GitHub freigegeben, und weitere Hardware und Unterstützung für Automodelle kommen sukzessive hinzu.
Videos mit Partnerbeispielen umfassten den chinesischen Bushersteller King Long und das aus einem Universitätsprojekt hervorgegangene Start-up Momenta.

Besonderes Augenmerk wird auch auf Straßenkarten gelegt. Diese helfen dem Fahrzeug herauszufinden, wo es ist, was um das Fahrzeug herum ist, beim Planen der Route und bei der Simulation in der Entwicklung. In den Straßenkarten sind die Ampelanlagen mit präzisen Positionen und Montagehöhen markiert, sowie zugehörige Bodenmarkierungen. Auch sogenannte virtuelle Straßenmarkierungen sind darin enthalten, wie beispielsweise bei Kreuzungen, wo es im Kreuzungsbereich keine Markierungen gibt. Weitere Straßenkartenelemente umfassen Spurweiten, Geschwindigkeitsbeschränkungen, oder Bodenschwellen.
Bis 2020 sollen alle Straßen und Autobahnen in China erfasst sein. Um auch anderen Ländern die Integration von Straßenkarten zu ermöglichen setzt man auf offene Standards wie OpenDrive.
Ein wichtige Punkt war auch die Entwicklung eines Simulators. Damit serientaugliche Fahrzeuge entwickelt werden können müssen 10 Milliarden Kilometer von Testfahrzeugen abgespult werden. Bei 100 Fahrzeugen die 24 Stunden pro Tag unterwegs sind, würde das immer noch 225 Jahre dauern. Simulatoren beschleunigen und verbilligen diese Aufgabe. Sowohl Uber als auch Waymo fahren bereits mehrere Milliarden Kilometer pro Jahr im Simulator.
Baidu hat auch einen Investmentfonds in der Höhe von 1,5 Milliarden Dollar für die nächsten drei Jahre eingerichtet, um Start-ups bei der Entwicklung von selbstfahrenden Autos zu helfen. Ziel ist es an die 100 Projekte um Hardware, Produkt, Daten und Entwicklungswerkzeuge zu unterstützen.
Neben Geld betonten Open Source Entwickler, dass sie auch noch Trainingsdaten bräuchten, sowie Hilfe bei Tests und im Umgang mit Regulierungsbehörden, sowie Unterstützung für weitere Sensoren, Hardware und Autos. Auch dabei will Baidu helfen.
Dieser Beitrag ist auch auf Englisch erschienen.

… ob Herr Müller das alles auch ein wenig verfolgt? ..,, ernst nimmt?
LikeLike