Waymo One hat vor einigen Wochen die Genehmigung erhalten, autonome Autos in Kalifornien auch ohne Fahrer testen zu dürfen. Allerdings mit einigen Auflagen, und eine davon war, dass die Autos nur bei leichtem Regen unterwegs sein dürfen.
Regen stellt eine Herausforderung dar, da Regentropfen auf den Kameras und LiDARs die Sicht behindern und Reflexionen auf Tropfen das Licht streuen und somit das Signal verringern. Deshalb testen die Unternehmen ausgeklügelte Algorithmen, die mit den verzerrten Signalen umgehen sollen.
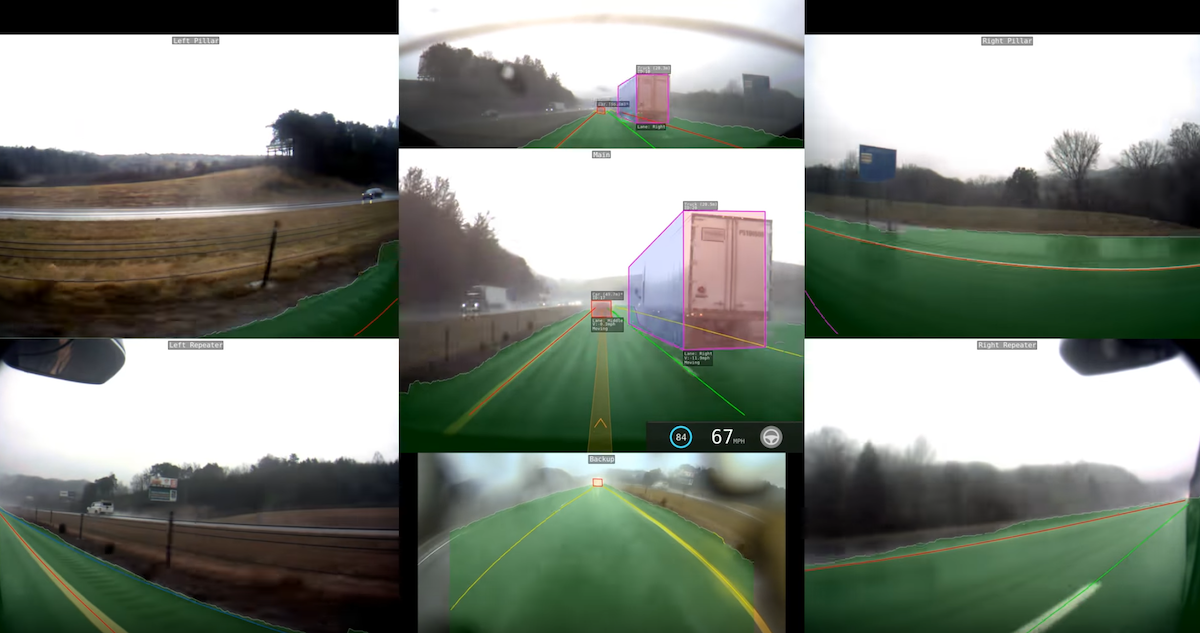
Hier ist ein Beispiel, wie der Tesla Autopilot – ein Fahrerassistenzsystem – in der Firmware-Version 18.48.12.1 von Regen beeinflußt wird und wie Objekte erkannt werden. Das Video inkludiert sieben der acht Kameras.
Hier dieselbe Fahrt aus der Sicht der achten narrow Kamera:
Auch Torc Robotics testet seine Fahrzeuge bei Regen. Hier ist ein Zusammenschnitt von Fahrten bei Regen, leider ohne viel Erklärung. Selbst wenn die Sonne scheint können Reflexionen von nassen Fahrbahnoberflächen Spurmarkierungen verzerren und müssen vom Fahrzeug richtig interpretiert werden.
Wie man leicht erkennen kann, können die Fahrzeuge bereits mit gewisser Sicherheit mit Regen umgehen, es muss aber noch daran gearbeitet werden. Allerdings führt Regen nicht zu einem Lahmlegen von autonomen Autos, wie das gerne von kolportiert wird.
Dieser Beitrag ist auch auf Englisch erschienen.

1 Kommentar