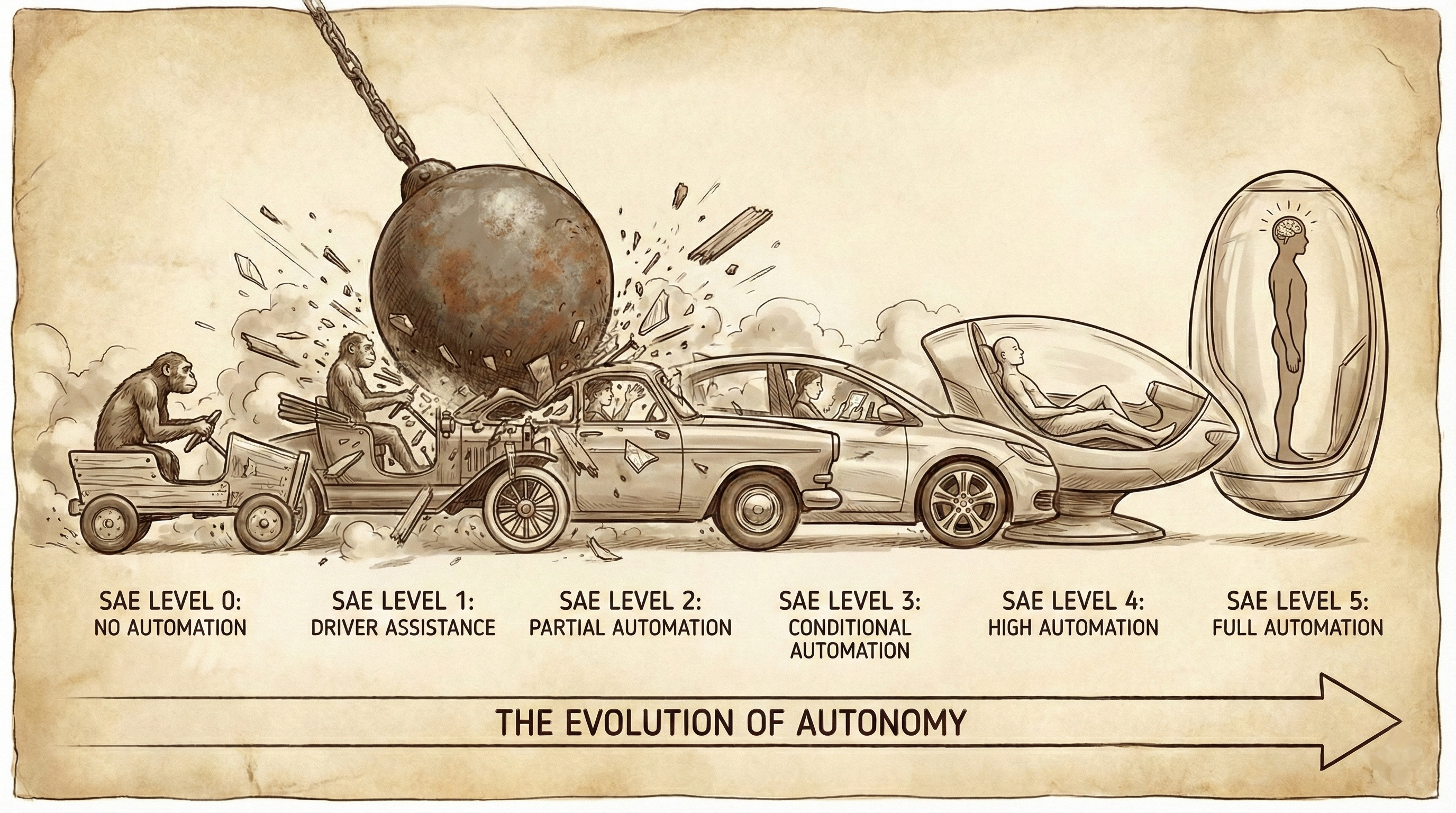
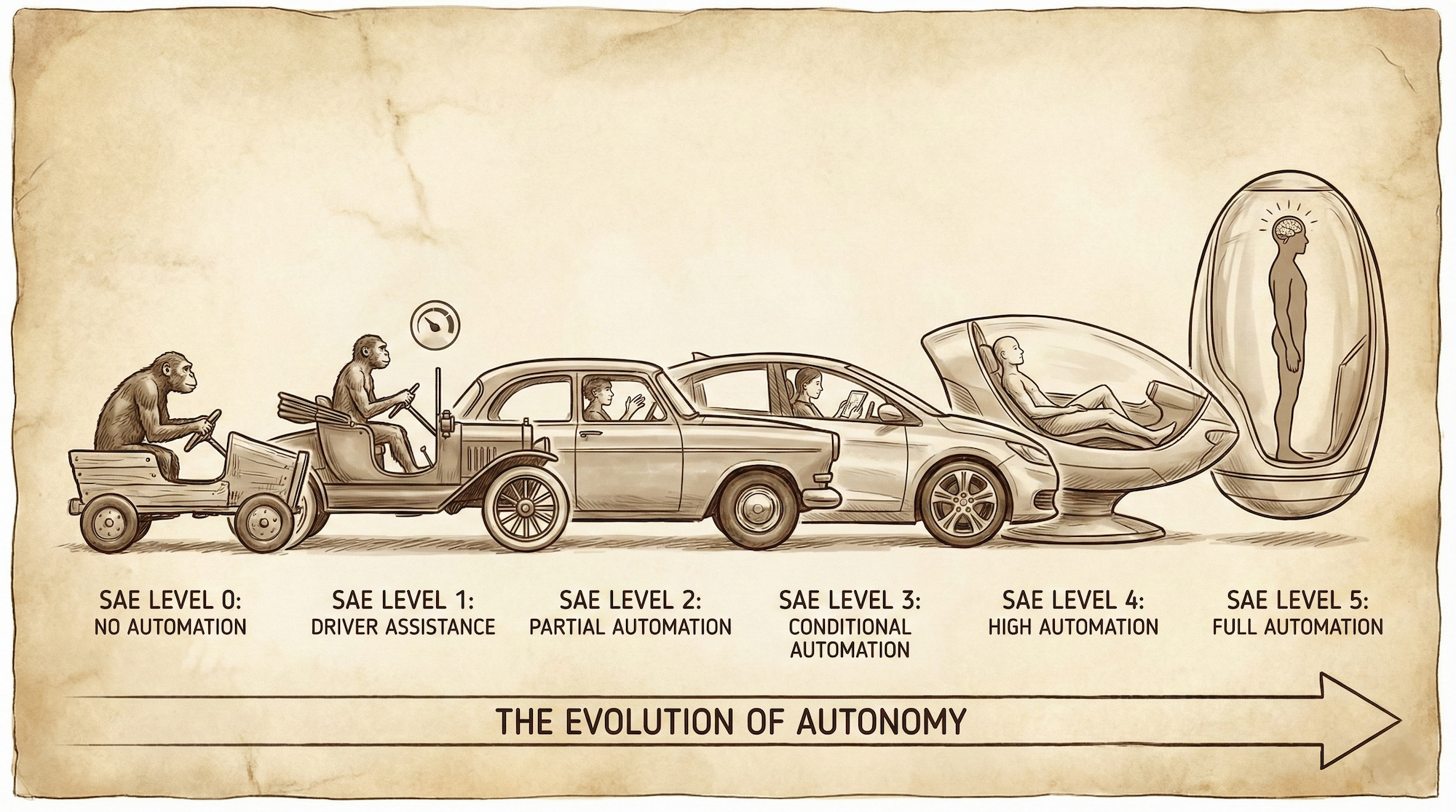
Spätestens mit der Ausweitung von kommerziellen, fahrerlosen Robotaxidiensten in den USA und China, wo dieses Jahr mit einer Verdopplung der Metropolregionen zu rechnen ist, in denen Robotaxis im Einsatz sein werden, fällt der Fokus zurück auf eine Klassifizierung, die immer weniger Sinn macht. Die Rede ist von der Norm SAE J3016. Diese beschreibt in sechs Stufen – von Level 0 bis Level 5 – Fahrmodi, die von komplett vom Menschen bis komplett von der Maschine gesteuert reichen. Diese Norm wurde von der Society of Automotive Engineers, kurz SAE, erstellt und trat im Jänner 2014 in Kraft.
In dieser Norm wird unterschieden, welchen Anteil ein menschlicher Fahrer an der Steuerung und Aufsicht eines Fahrzeugs hat. Auf Stufe 0 obliegen dem Menschen alle Aufgaben unter allen Bedingungen zu hundert Prozent. Auf Stufe 5 hat das Fahrzeug die Kontrolle und Verantwortung über das Fahrzeug unter allen Bedingungen. Und dazwischen gibt es Abstufungen, die nicht einfach eine lineare Fortsetzung sind.
Level 0: Keine Automation. Der menschliche Fahrer führt alle Fahraktivitäten aus, selbst wenn Warnsignale aufleuchten.
Level 1: Fahrerassistenz. Das Fahrzeug kann beim Lenken oder bei einer Geschwindigkeitsanpassung unter gewissen Bedingungen assistieren, der menschliche Fahrer behält jedoch nach wie vor die vollständige Kontrolle.
Level 2: Teilautomation. Das Fahrzeug kann unter bestimmten Bedingungen die Lenkung oder Geschwindigkeitsanpassungen übernehmen, der menschliche Fahrer ist nach wie vor vollständig für das Steuern verantwortlich. Kurzformel: Hände weg (hands off)
Level 3: Bedingte Automation. Das Auto lenkt, passt die Geschwindigkeit an und beobachtet die Straße. Vom menschlichen Fahrer wird erwartet, dass er die Kontrolle übernimmt, wenn das System Hilfe benötigt. Kurzformel: Augen weg (eyes off)
Level 4: Hohe Automation. Das Fahrzeug kann so ziemlich alles entscheiden, auch wenn der menschliche Fahrer auf eine Hilfeanfrage des Systems nicht reagiert. Kurzformel: Aufmerksamkeit weg (mind off)
Level 5: Vollständige Automation. Das Fahrzeug übernimmt und ersetzt den Menschen.
Wer sich mit dem Thema automatisiertes und autonomes Fahren beschäftigt, stößt rasch auf diese Norm und versucht zu beantworten, auf welcher Stufe sich wohl das vor ihm stehende nicht-automatisierte, automatisierte, oder autonome Auto befände. Diese Einteilung dient Politiker, Verkehrsmittelbetreiber und – verantwortliche, Verkehrsplaner, Taxiunternehmen oder Privatleuten dazu, die Thematik besser zu verstehen. Leider führt diese Norm auch dazu, dass es zu einigen Missverständnissen kommt, die autonomes Fahren unerreichbar oder rechtliche Fragen unbeantwortbar scheinen lassen, und viele Aspekte nicht berücksichtigen.
Der Grund dafür ist recht einfach. Als diese SAE Stufen 2014 in Kraft getreten sind, gab es zwar bereits einige Fahrerassistenzsysteme, aber noch keine autonomen Autos. Damit fehlten die Praxiserfahrung und das Wissen, welche Entwicklungen es um autonome Fahrzeuge geben würde, da auch gleichzeitig die Entwicklung des neuen Antriebsstranges für Elektrofahrzeuge in den Anfängen lag, und sich damit die Möglichkeiten erweiterten.
Auch zeigte sich, dass der technologische Sprung von Level 3 auf Level 4 so groß ist, dass es sich ab diesem Moment einfach um zwei verschiedene Systeme handelt. Wie sich ebenso herausstellt, ist Level 5, also vollautonomes Fahren, keine notwendiges und zugleich fast unmöglich zu erreichendes Endziel. Und Level 4 ist mit hybriden Methoden rascher zu leisten, als ursprünglich gedacht. Doch dazu nun hier mehr.
Herausforderungen
Die größte Verwirrung schaffen die SAE Level, indem sie einerseits Birnen und Äpfel den gleichen Status geben, und andererseits die Stufen eine Absolutheit vermitteln, die wenig Raum für praktische Varianten erlauben. Damit werden Erwartungen in die Höhe geschraubt, die zu Enttäuschung führen oder Anforderungen gestellt, die autonomes Fahren in weite Ferne zu rücken scheinen.
Die bessere Kerze
Ein Beispiel, wo Erwartungen in die Höhe geschraubt wurden, ist der Intelligent Drive Pilot von Mercedes. Dabei handelt es sich um eine Fahrfunktion , die als erste Technologie eine Level 3-Zulassung in Deutschland, Kalifornien und Nevada erhalten hat. Damit dürfen diese Fahrzeuge auf der Autobahn anfänglich mit 60km/h, seit kurzem auch mit 95km/h hinter einem Führungsfahrzeug (Lead-Fahrzeug) ohne Spurwechsel bei gutem Wetter betrieben werden, ohne dass der Fahrer sich um das Fahrzeug kümmern muss. Der Fahrer darf E-Mails oder ein Buch lesen, und andere Dinge machen, muss allerdings jederzeit übernehmen können, wenn ihn das System mit entsprechender Vorlaufzeit hinweist.
Deutsche Hersteller glauben, dass sie mit Level 3 sich langsam auf Level 4 vorarbeiten können. Das ist aber nichts anderes als die Kerze weiter zu optimieren, während andere die Glühbirne bauen. Oder in einem anderen Beispiel, dass man die Leiter zum Mond baut anstelle der Rakete. Warum? Weil man mit der Technologie der Leiter vertraut ist, und den Fortschritt sieht, während man mit der Rakete erst eine ganz neue Technologie entwickeln muss, wo man lange keinen Fortschritt sieht. Am Ende aber gewinnen diejenigen, die eine Rakete entwickelt haben. Warum sage ich das?

Ein solches Level 3-System muss nicht wissen, was genau da vor ihm unterwegs ist und wie es sich über losfahren und abbremsen auch noch anders verhalten könnte. Es muss nicht verstehen, dass das Fahrzeug vor ihm ein LKW, ein PKW oder ein Motorradfahrer ist. Bewegliche Objekte wie Fußgänger, Tiere, oder Rollstuhlfahrer muss das System auch nicht erkennen, geschweige denn Ampeln, Abbiegespuren oder Polizisten. Also nichts, was im städtischen oder ländlichen Verkehr schon mal auf einer Straße dem Fahrzeug begegnen könnte. Und schon gar nicht muss es über deren typischen Verkehrsverhalten wissen.
Diese Objekte zu klassifizieren und deren Verhaltensweisen zu erkennen erfordert ein wesentlich komplexeres Softwaresystem, das für ein Level 3-System weit übertrieben wäre. Der Sprung von Level 3 auf Level 4 ist somit ein großer. Solch ein Level 3-System ist eher mit einer besseren Kerze oder besserem Segelschiff zu vergleichen, als mit der Glühlampe oder dem Dampfschiff, wie es ein Level 4-System darstellen würde. Es handelt sich um eine vollständig andere Architektur und Komplexität.
Das haben Firmen wie Google, Zoox oder damals noch Cruise recht früh verstanden und sich deshalb gar nicht mit der Entwicklung eines Level 3-Systems aufgehalten, sondern haben gleich Level 4 angegangen.
Level 4 für einfaches Parken und komplexes Stadtfahren
Eine weitere durch die SAE Level verursachte Mogelpackung stellt der Intelligent Park Pilot von Mercedes dar. Diesen stellten die Stuttgarter vor zweieinhalb Jahren vor. Der Park Pilot erlaubt das selbständige Einparken des Fahrzeugs ohne dass sich ein Fahrer im Fahrzeug befinden muss.
Dabei reserviert man vor der Fahrt in die Garage einen Stellplatz und fährt mit dem Fahrzeug in eine Staging Area, wo der Fahrer dann aussteigt und das Fahrzeug von selbst auf den freien Parkplatz fährt. Dazu ist es notwendig, dass die Garage mit der entsprechenden Technologie ausgestattet ist, denn sie übernimmt die Steuerung des Mercedes und „lenkt“ das Fahrzeug.
Bis heute ist diese Technologie weltweit nur in einer einzigen Garage verbaut, nämlich in der Parkgarage am Flughafen Stuttgart. Für diese Funktion muss man als Mercedes S-Besitzer allerdings einige tausend Euro hinblättern. Dafür, dass man eigentlich am Flughafenterminal abgeladen werden will und nicht in einer Garage, von der man dann mit Koffer zum Terminal gehen muss.
Das dicke Ding kommt allerdings noch: diese sehr eingeschränkte Funktion zählt genauso als Level 4-Funktion gemäß der SAE-Stufen, wie Waymos Fähigkeit, in einer ganzen Stadt wie San Francisco unter (fast) allen Bedingungen zu fahren. Mittlerweile haben verschiedenste Hersteller aus China (BYD, Xpeng, Xiaomi…) und den USA (z.B. Tesla) eigene automatisierte Parkfunktionen im Angebot, die keine weitere installierte Technologie auf Parkplätzen und Parkgaragen benötigt.
Doch die Definition der SAE Stufen vermitteln den Eindruck, dass es sich um ein Auto mit Level 4-Fähgikeiten wie die Robotaxis von Waymo handelt.
Erkenntnisse
Wir sehen anhand dieser wenigen Beispiele bereits, wie kurz die SAE Stufen greifen, beziehungsweise wenig hilfreich sie sind. Ebenso wurde seit 2014 nicht nur Erfahrung mit den ersten kommerziellen Fahrdiensten gesammelt, gleichzeitig gelang auch eine weitreichende Umstellung auf einen neuen Antriebsstrang, der neue Möglichkeiten zuließ, und den die SAE Stufen einer einer recht engen Betrachtungsweise nicht berücksichtigten.
So erlauben heute gängige Skateboard-Plattform für Elektrofahrzeuge eine große Variante von Mobilitätsformen, die es 2014 nicht so gab. Lieferwagen von Kühlbox- bis LKW-Größe, PKWs, die Formen von heute üblichen Fahrzeugen aufweisen, oder Formen wie Einsitzer bis zu vollständig neuen Shuttles und Kabinenrollern annehmen, wie es sie bislang nicht gab. Auch Busse oder selbstfahrende Läden sind in Entwicklung, letztere gab es so vorher nicht. Wo diese Fahrzeuge unterwegs sind, ist auch im Fluss. Von Straßen bis hin zu Gehsteigen reicht mittlerweile das Spektrum.
Dabei stehen wir erst am Anfang, die Zukunft wird noch einige Überraschungen bringen, wie wir bereits an einer neuen Mobilitätsform erkennen, die von den bisherigen Entwicklungen profitiert: humanoide Roboter. Diese können sich nicht nur im öffentlichen Raum, sondern auch in Gebäuden selbst bewegen, oder sogar in fahrenden Fahrzeugen. Und dabei Tätigkeiten ausführen, die bislang Menschen überlassen waren. Autonomie erhält hier eine erweiterte Bedeutung.
Level 5 braucht man nicht
Um die Überschrift gleich mal zu relativieren, sage ich nur, dass es natürlich sehr schön wäre, ein Level 5-System zu haben. Damit braucht man keinen Menschen mehr, das Fahrzeug kann jederzeit unter allen Bedingungen die Kontrolle behalten. Doch praktisch ist das auch für Menschen nicht möglich. Befestigte Straßen, Feldwege und solche ohne Straßen werden heute von Menschen befahren, und trotzdem bleiben sie gelegentlich auch dort hängen und benötigen Hilfe, um weiter zu kommen. Ein schlammiger Feldweg, eine überschwemmte oder durch Ladung oder umgestürzte Bäume versperrte Straße, ein aus dem Boden zu weit herausragender Felsen auf dem das Fahrzeug aufsitzt, tiefer Sand oder einfach unerwartetes und zu dichtes Grünzeugs haben schon viele Fahrzeuge lahm gelegt und erst mit viel menschlicher Hilfe aus der misslichen Lage gerettet.
Level 4 ist früher und anders da, als erwartet
Wie wir mit Waymo und anderen Robotaxiflotten bereits sehen, reicht für einen funktionierenden Service Level 4 vollends. In der Mischung aus Teleassist/Teleoperation können, wie hier beschrieben, autonome Autos schon ab Level 4 ausreichend sein. Situationen, wo ein Teleassistent oder Teleoperator eingreifen muss, sind nicht notwendigerweise für Passagiere in den Robotaxis sichtbar. Jede solche Situation wird aufgezeichnet und zum Trainieren des Level 4-Systems verwendet. Solche Fälle werden damit weniger, und damit auch Situationen, die einen Eingriff von Teleassistenten oder Teleoperatoren benötigen.
Level 4 kann auch ganz eingeschränkt bis zu weit offen sein. Fahrzeuge auf einem kleinen Firmengelände, wo sich spezialisierte Fachkräfte bewegen, der Zugang kontrolliert und die Verkehrsverhältnisse klar definiert sind, sind sehr rasch einrichtbar und schon heute gang und gäbe. In größerem Maßstab kann eine Operational Design Domain (ODD) auf ganze Städte und Metropolregionen mit viel höherer Komplexität erweitert werden, wie wir sie beispielsweise von Waymos Robotaxiflotte in der San Francisco Bay Area kennen, die von San Francisco bis San Jose reicht und dazwischen kleine Städte verbindet und durch Autobahnen, städtische Straßen und Landstraßen verbunden sind.
Spezielle Infrastruktur wird nicht benötigt
Gerade in Europa wird als Voraussetzung für die Implementation von autonomen Fahren eine entsprechende Straßenverkehrsinfrastruktur in Form von Smart Roads erwartet. Nichts könnte falscher sein. Gerade die US-amerikanischen Hersteller zeigen, dass sie ohne V2X-Kommunikation mit Ampeln, Kreuzungen, Straßenschildern oder anderen Verkehrsteilnehmern auskommen. Teure Infrastrukturmaßnahmen sind nicht Voraussetzung für ein funktionierendes Fahren auf Stufe 4.
Ganz im Gegenteil. Sobald der Verkehr vollständig von autonomen Fahrzeugen abgedeckt wird, können voraussichtlich 90 Prozent der Ampelanlagen und Straßenschilder entfernt werden. Mehr dazu auch in diesem Beitrag.
Wichtiger sind andere Unterscheidungen
Welche Kriterien sind für Verkehrsplaner, Taxiunternehmer, Regulatoren, Politiker oder Verkehrsbetriebe hilfreicher, wenn über autonome Fahrzeuge und den Stand der Dinge diskutiert wird?
Hier sind ein paar Fragen, die zu beantworten wären:
- Wie ist der Fahrkomfort?
- Für welchen Einsatzzweck? Fahrzeugtyp und -aufgabe (z.B. Personentransport, Lieferroboter, Schuhladen…);
- Für welches Einsatzgebiet? Industriegelände, Straßen, Feldwege, in Gebäuden…
- Bei welchen Bedingungen? Geschwindigkeit, Wetter, Umfeld…
- Wie hoch ist die Interventionshäufigkeit durch einen menschlichen Teleassistenten/Teleoperator?
- Welche Betriebsart ist angedacht? Privat, ÖPNV, kommerzielle Flotte, Zivil/Militär, Einsatzfahrzeug, medizinischer Transport…
- Für welche Passagiere? Behinderte, Kinder, Ältere, Pendler, Frauen… (speziell vulnerable Personengruppen)
- Wie sieht es mit der bisherigen Sicherheitsstatistik aus?
- Sind Infrastrukturanpassungen, wie Smart Road, eigene Fahrstreifen etc., für dein Einsatz zwingend notwendig?
- Wie verhalten sich die autonomen Fahrzeuge in einem Mischbetrieb mit anderen, manuell gesteuerten Verkehrsteilnehmern?
- …
Als Betreiber wäre es mir wichtiger zu verstehen, in welcher Operational Design Domain (ODD), also für welches Einsatzgebiet und unter welchen Bedingungen ein autonomes Fahrzeug einsetzbar ist.
- ein Industriegebiet mit geschultem Personal und recht klar abgegrenzter Herausforderung?
- eine Stadt mit viel unterschiedlichen Verkehrsteilnehmern?
- ein ländliches Gebiet mit vielen Landstraßen mit wenig Verkehr, dafür aber vielleicht häufigem Wildwechsel
- vorwiegend lange Strecken auf Autobahnen, wo die Fahrt auf Zufahrtsstraßen durchaus von menschlichen Fahrern gewährleistet werden kann (wie beispielsweise LKWs die vom Lage zur Autobahn gefahren und von da an autonom fahren, bis sie bei der Ausfahrt wieder von einem menschlichen Fahrer übernommen werden)
- …
Statt SAE Stufen eine neue Kategorisierung
Der Fokus sollte ab sofort auf alles ab der SAE Stufe 4 liegen, und diese neu unterteilt einem Kriterienkatalog unterzogen werden, der autonome Mobilitätssysteme neu kategorisieren lässt. Kriterien könnten dabei folgende sein:
- Wetterbedingungen:Allwetter, nur gutes Wetter,…
- Gebiet: Überall, Industriegelände, Stadt, ländlicher Raum…
- Räumlichkeit: Öffentlicher Raum, in Gebäuden,…
- Weg: befestigte Straßen, Feldweg, Gehsteig,…
- Transportiertes Objekt/Subjekt: Person, Tiere, unverderbliche/verderbliche Ware, Medikamente…
- Personentyp: Kinder, Behinderte, Ältere, Frauen,…
- Verkehrsbenutzungstyp: ÖPNV, Privat, Robotaxi, Lieferfahrzeug, LKW, Geschäftslokal, Bus, Schlafwagen,…
- Hybridbetrieb: Ohne menschlichen Eingriff, Teleassist, Teleoperation (Prozentanteil Mensch/Maschine), vollständige Teleoperation,…
- Smart Roads: Sensoren, Verkehrsleitmittel,…
- Mischbetriebfähigkeit: nur autonome Fahrzeuge, Mischbetrieb mit menschlich gesteuerten Verkehrsmitteln,…
- …
Die bisherige Einteilung nach SAE Stufen 0 bis 5 haben gezeigt, dass sie wenig hilfreich sind, autonome Fahrzeuge korrekt zu kategorisieren. Diese Hilfestellung benötigen Verkehrsplaner, Politiker, Einsatzkräfte, Verkehrsmittelbetreiber und Regulatoren, um die Einsatzbereitschaft abzuschätzen, Erwartungen zu erfüllen, und entsprechende Vorbereitungen für den Betrieb, die Kosten oder die Sicherheit zu treffen.

Dieser Beitrag ist auch auf Englisch erschienen.

2 Kommentare