
Während die Untersuchungen des ersten tödlichen Unfalls mit einem selbstfahrenden Auto laufen, werden mehr und mehr Details des tragischen Zwischenfalles bekannt. Diese Details klären noch nicht ganz die Schuldfrage und wie der Unfall zu vermeiden gewesen wäre.
Am Sonntag um ca. 22:00 Uhr war ein selbstfahrendes Experimentalfahrzeug von Uber im autonomen Modus auf der North Mill Avenue in Tempe im US-Bundesstaat Arizona unterwegs. Tempe ist ein Vorort von Phoenix und liegt zwischen Phoenix und Chandler. Das Auto war mit einer Geschwindigkeit von 40 Meilen pro Stunde (64 Stundenkilometer) unterwegs, was um etwa fünf Meilen (8 kmh) über der Geschwindigkeitsbeschränkung liegt. Im Fahrzeug war ein Sicherheitsfahrer anwesend, der im Notfall die Kontrolle übernehmen soll und kann. Die Sicht war ebenso klar wie auch das Wetter.

Laut örtlicher Polizei befand sich in der Mitte der an dieser Stelle vierspurigen Fahrbahn eine 49 Jahre alte Frau, die ein mit Plastiktüten beladenes Fahrrad schob. Sie kam vom Mittelstreifen, der die Richtungsfahrbahnen voneinander trennt. In ungefähr 30 Meter Entfernung befand sich eine Fußgängerübergang an der Kreuzung North Mill Avenue und East Curry Road. Die Frau trat unvermittelt vor das Uber-Fahrzeug, wurde von diesem erfasst, zu Boden geschleudert und erlag in Folge ihren Verletzungen. Das Uber-Fahrzeug hat erst gebremst, als der Unfall bereits geschehen war. Ein Alkoholtest beim Sicherheitsfahrer ergab keinen Drogen- oder Alkoholeinfluss.




Orte wie Chandler, Tempe oder Mountain View werden von den Herstellern von Selbstfahrtechnologien wegen ihre relativ geordneten Verkehrs- und Straßenverhältnisse gewählt. Auch bietet das zumeist sonnige Wetter Idealbedingungen für die Entwicklung dieser Technologie.
Die Frage die sich stellt ist, warum das Fahrzeug die laut Polizei sich in der Mitte der Fahrbahn befindliche Person nicht erkannte? Dazu muss man wissen, wie autonome Autos die Welt sehen. Das Uber-Fahrzeug – ein Volvo XC90 – das von Uber mit firmeneigenen Selbstfahrtechnologie ausgestattet wurde, hat sieben Kameras, Radarsensoren und einem Lidar am Wagen montiert.
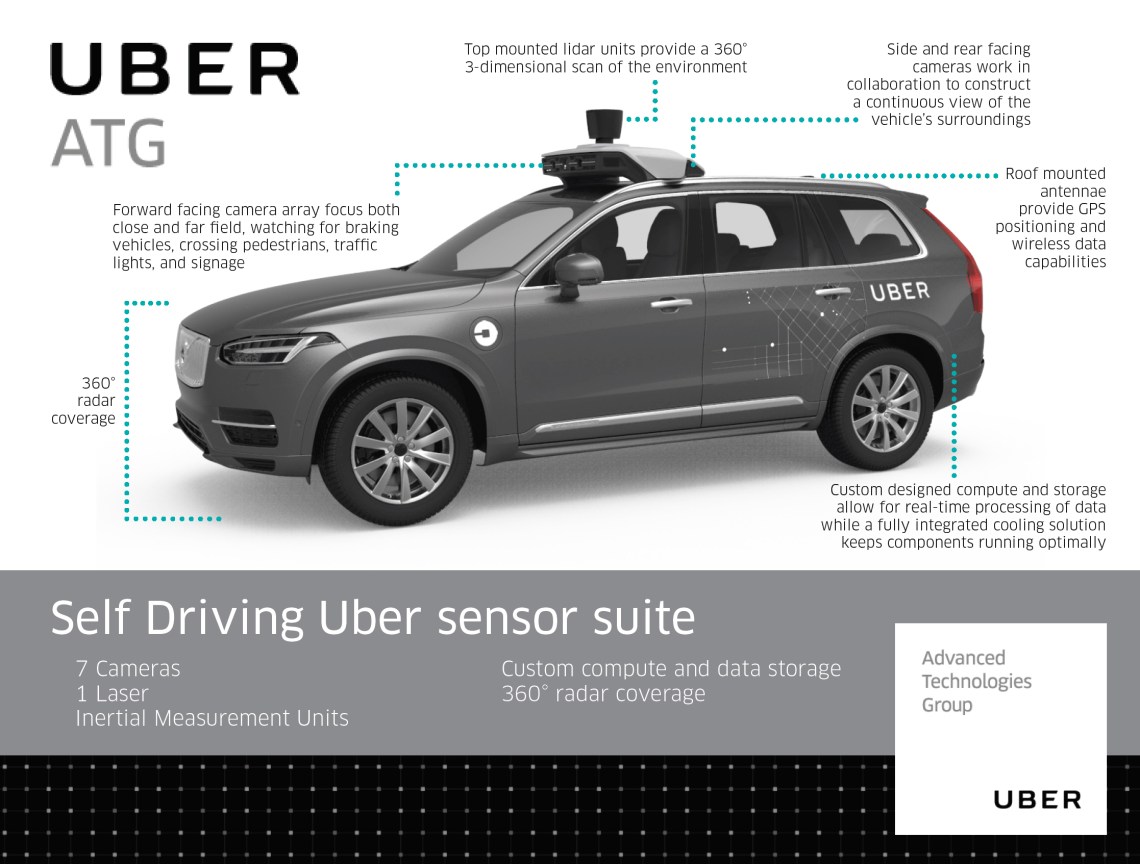
Die Kameras dienen Objekte zu klassifizieren und entsprechend darauf zu reagieren. Fußgänger, geparkte und fahrende Autos, Verkehrsschilder und Ampeln oder Fahrbahnmarkierungen können von den Kameras erkannt werden. Das Lidar schafft mit seinen Lasern eine dreidimensionale Abbildung, 360 Grad um das Auto herum. Das Lidar kann dabei bis zu 200 Meter weit sehen und Objekte in der Größe eines Fußball erkennen. Die Sensoren teilen sich die Aufgaben, weil Kameras beispielsweise Verkehrsschilder und deren Aufschriften besser erkennen können, Lidars hingegen ein dreidimensionales Bild erzeugen. Ultraschallsensoren dienen dazu Objekte die sich nah am Fahrzeug befinden zu erkennen, wie es beispielsweise beim Einparken notwendig ist, Radarsensoren hingegen erlauben fernere Objekte zu detektieren, wie beispielsweise auf der Autobahn vorausfahrende Autos.
Schwierig werden Situationen, wenn sie Objekte nicht bewegen und aufgrund von Licht- oder Wetterverhältnissen sie nicht richtig erkannt werden. In der Nacht kämpfen Kameras mit geringen Kontrasten, bei Regen und Schnee haben Lidars zu viele Reflexionen durch die Regentropfen und Schneeflocken.
Auch für autonome Fahrzeuge gelten die Gesetze der Physik. Unverhofft vor das Fahrzeug tretende Personen oder ausscherende Autos können ebenso schwer vorhergesagt werden, wie es bei menschlichen Fahrern der Fall ist.
Warum nun das Uber-Fahrzeug wirklich die Fußgängerin nicht erkannt hat, kann mehrere Gründe haben, technologische oder Misinterpretation von Absichten:
- die Kameras erfassten die Fußgängerin aufgrund der Dunkelheit nicht
- die Fußgängerin bewegte sich anfänglich nicht und wurde deshalb nicht richtig erfasst; als sie sich bewegte war es zu spät
- die Form der Fußgängerin, die auch ein Fahrrad mit Plastiktüten beladen schob, war für die Algorithmen nicht als ein bereits in der Datenbank klassifiziertes Objekt erkennbar
- das Fahrzeug nahm an, dass die Fußgängerin dem Fahrzeug den Vorrang lässt
- wichtige Sensorsysteme oder der Computer des Autos versagten
Ebenso nicht auszuschließen ist, wenn auch wenig wahrscheinlich, dass das Opfer Suizidabsichten hatte und diese Gelegenheit nutzte.
In Arizona haben generell Fußgänger den Vorrang. Allerdings müssen sie sich auch an die Gesetze halten und die Straßen an entsprechend markierten Kreuzungen überqueren. Tatsächlich ist es unter Umständen strafbar, die Straßen in der Nähe aber außerhalb von Fußgängerübergängen zu queren. Das wird in den USA als jay walking bezeichnet.
Die Geschwindigkeit des Fahrzeugs das über der erlaubten lag ist eher weniger der Grund für den Unfall. Dazu muss man wissen, dass in den USA die Geschwindigkeiten regelmäßig um einige Meilen pro Stunde über der erlaubten liegen. Auch die selbstfahrenden Autos werden so programmiert, um von anderen Verkehrsteilnehmern nicht als ‚rollende Hindernisse‘ betrachtet zu werden und aggressive Reaktionen hervorzurufen. Tatsächlich müssen die Entwickler von selbstfahrenden Autos genau diesen Spagat zwischen Sicherheit und Einhalten der Geschwindigkeit, sowie Vermeidung des Hervorrufens von aggressiven Reaktionen anderer Verkehrsteilnehmer machen.
Der Polizei in Tempe liegen die Videoaufzeichnungen des Fahrzeugs vor. Gemeinsam mit der Nationalen Verkehrssicherheitsbehörde werden nun die Untersuchungen vorgenommen. Vorläufig hat Uber alle Tests mit seinen mehr als hundert Fahrzeugen in Kalifornien, Arizona und Pennsylvania eingestellt.
Dieser Beitrag ist auch auf Englisch erschienen.

1 Kommentar